Human-Robot Collaboration and Companionship Lab
 Since high school, I knew that I had a deep
interest in robotics. At Cornell, I became aware of the field of Human Robot Interaction through one of my professors and
applied to the Human-Robot Collaboration and Companionship lab under Principal Investigator Professor Guy Hoffman.
Since high school, I knew that I had a deep
interest in robotics. At Cornell, I became aware of the field of Human Robot Interaction through one of my professors and
applied to the Human-Robot Collaboration and Companionship lab under Principal Investigator Professor Guy Hoffman.
 My work in HRC2 consists of working with
2 PhD music composers and Professor Marianthi Papalexandri-Alexandri to develop
multiple robotic instruments that can use AI to create sonic and visual
effects. The two composers, Piyawat Louilarpprasert and
Miles Friday, offered ideas and criticisms while I did my
best to create the components that would help realize their artistic goals. The instruments are to be a part of a
performance in NYC during Spring 2022. I worked primarily on 3 instruments:
My work in HRC2 consists of working with
2 PhD music composers and Professor Marianthi Papalexandri-Alexandri to develop
multiple robotic instruments that can use AI to create sonic and visual
effects. The two composers, Piyawat Louilarpprasert and
Miles Friday, offered ideas and criticisms while I did my
best to create the components that would help realize their artistic goals. The instruments are to be a part of a
performance in NYC during Spring 2022. I worked primarily on 3 instruments:
Tube Spinner - Piyawat's Machine
Piywat’s machine investigates the effect of visual and sonic effects created by flexible tubes spinning and scraping against
a standing PVC pipe. My work for this project consisted of prototyping several designs that each yielded a different visual or sonic
effect. Significant sonic effects we explored were the whistling sound that a hollow tube makes when it is spun, the
whooshing sound of air pushed by a fan through the tube, the guiro-like sound of the tube scraping against another
tube, as well as the hum of whatever motor was present in the design. We also explored the visual effects of different
lengths of tubes spinning at various speeds which can cause them to either wrap around the PVC or spin freely as well
as allowing the base PVC to wave back and forth, similar to a tree in the wind.
Feedback Interference Car - Miles' Machine
The objective of this performance is to create a range of feedback sounds simply by moving a speaker, microphone, and
interference pane to different locations and orientations in a room. The speaker and microphone are each mounted
in different “walls” suspended inside an aluminum frame mounted to a swivel castor wheel base. The speaker and
microphone wall are meant to be controlled by humans and the feedback pane is mounted to a small self-driving car.
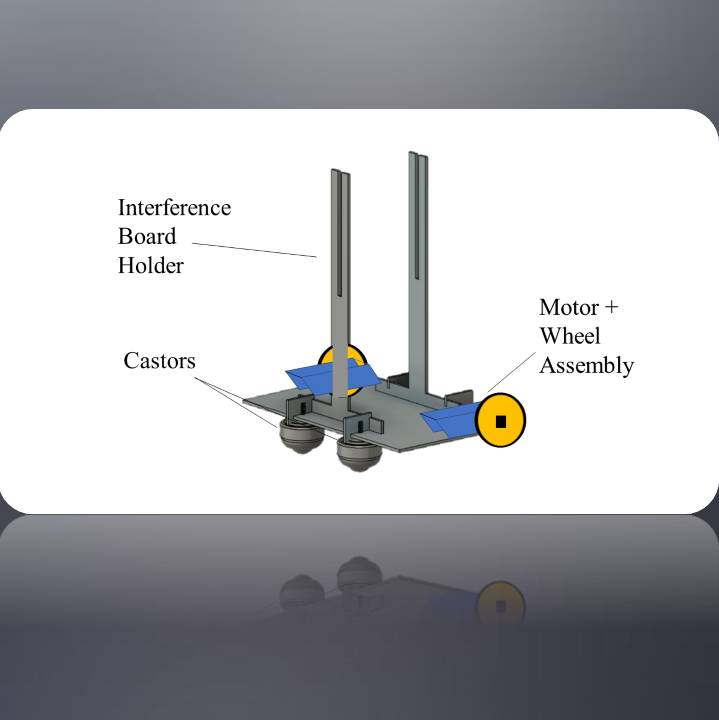
The primary device I worked on for this project was the car that drives the interference pane. I built the frame of the
car and the board holder using laser cut pieces with puzzle fits to maximize stability. The first iteration of the car was
powered by four DC motors connected to an arduino and controlled via IR remote. After feedback, I revised the design
to use two motors and castors in the back to reduce noise from the motors’ gears and wrote code to enable the car to
move around on its own and avoid obstacles in front of it. We also modified the mounts for the speaker and microphone
panels by suspending them from the frame using a thin string. Future work for this project includes modifying the size
of the car to better match the scale of the speaker and microphone panels and modifying the movement algorithm of
the car to be more random and respond to the current sound being produced.
Metronome Exploration
A metronome is a tool generally used by musicians to keep time. Classical metronome designs use a wind up spring
and a pendulum with an adjustable weight, which allows the user to change the tempo: consistent with the half-period
of the aforementioned pendulum. Metronomes employ a mechanism called an escapement that converts a varying
torque into a constant period.
Much of the early work on this project included experiments with different escapement mechanisms using an
escapement wheel and anchor, similar to classical metronomes. However, this proved difficult to execute with laser cut
pieces and early in the semester, I decided to switch to a design where the periodic motion imitated a boat rocking side
to side with perpendicular spinners on each side pushing the body each half-period. I was able to create such a body
sing laser cut pieces and incorporated a motor in order to provide the turning force on the spinning axle, replacing
the need for a wind up mechanism such as a spring or rubber band. Future iterations of this project will include a
mechanism to dispense sand onto a belt which will pass under a scraper to produce a sonic effect as well.