Combat Robotics at Cornell
 Coming from a high school FRC background, I was super excited to see what the engineering project teams, and robotics
in particular, would be like in college. Robotics is my favorite subfield of engineering because it allows for
continuous innovation and never gets stale. For 2 years, I worked with multiple project teams at Cornell and learned a lot,
while feeling like I was capable of more. Naturally, I chose to form my own team in order to create and hopefully
improve upon the inspiring environment I was lucky enough to have in FRC.
Coming from a high school FRC background, I was super excited to see what the engineering project teams, and robotics
in particular, would be like in college. Robotics is my favorite subfield of engineering because it allows for
continuous innovation and never gets stale. For 2 years, I worked with multiple project teams at Cornell and learned a lot,
while feeling like I was capable of more. Naturally, I chose to form my own team in order to create and hopefully
improve upon the inspiring environment I was lucky enough to have in FRC.
 With the help of some friends, I
formed the Cornell University Combat Robotics Team in March of 2019 and we were able to make great strides, finally becoming
a project team in January 2022. Over the last 3 years, I helped design and manufacture many of the robots in our arsenal today.
As the Training Lead of the team, I created an 8-week Combat Robotics Fundamentals training curriculum to teach members about
about design-oriented thinking, CAD, Arduino, Stress simulations, and strategies for building combat robots.
In March 2022, we competed at Norwalk Havoc Robot League, where our 12lb sportsman bot, Lance, went 1-1 and our 12lb kinetic robot went 4-2,
qualifying us for the finals in December!
With the help of some friends, I
formed the Cornell University Combat Robotics Team in March of 2019 and we were able to make great strides, finally becoming
a project team in January 2022. Over the last 3 years, I helped design and manufacture many of the robots in our arsenal today.
As the Training Lead of the team, I created an 8-week Combat Robotics Fundamentals training curriculum to teach members about
about design-oriented thinking, CAD, Arduino, Stress simulations, and strategies for building combat robots.
In March 2022, we competed at Norwalk Havoc Robot League, where our 12lb sportsman bot, Lance, went 1-1 and our 12lb kinetic robot went 4-2,
qualifying us for the finals in December!

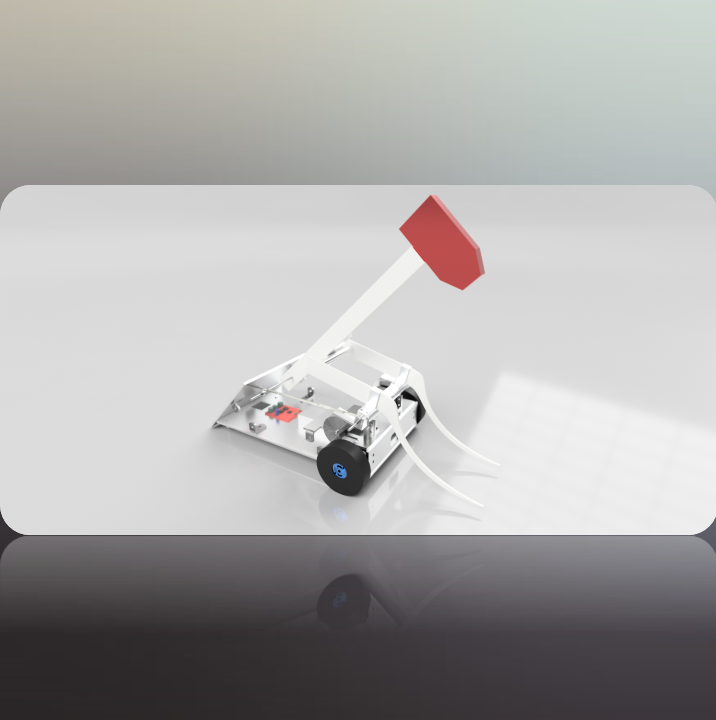

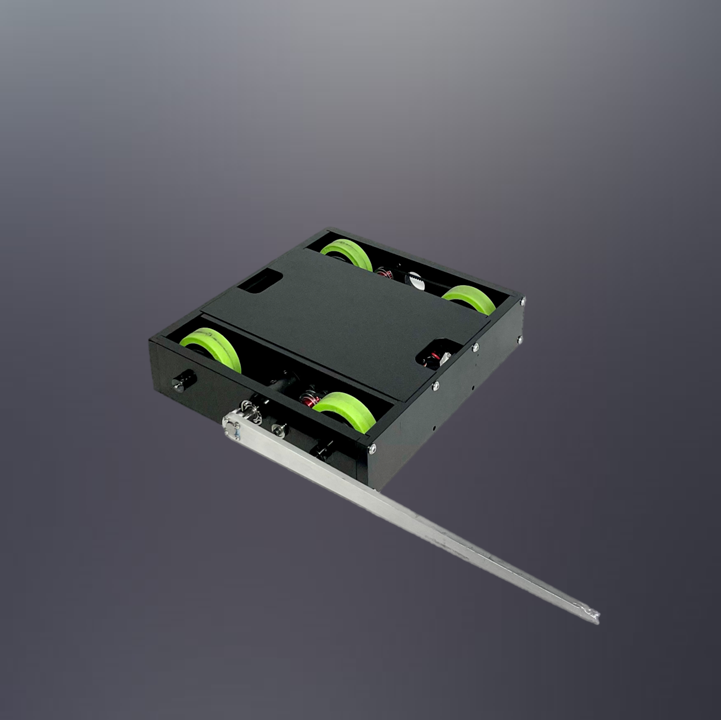
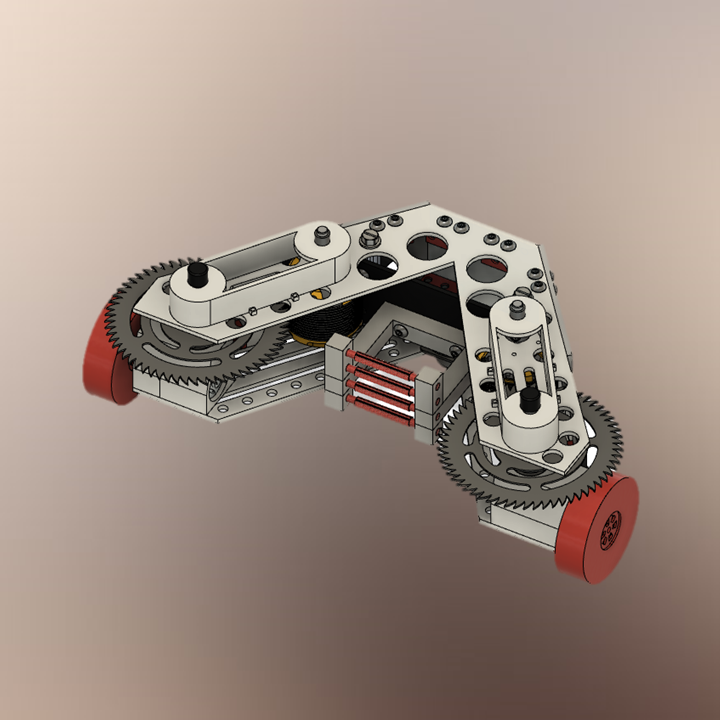
Manny
Aesthetically reminiscent of the lovable wooly mammoth from Ice Age, Manny was once an idea in my head I had about controlling multiple attack mechanisms with a single actuator. The two attacks come from a flipper that knocks the opponent up and a hammer that smacks the other robot back down. In design, the mechanisms are all ultimately linked to a position-controlled motor driving a snail drop cam. A follower is attached to each side of the flipper, which also pushes the back of the hammer to a certain height. The hammer would have a constant downforce applied by an elastic material (like surgical tubing) connected to the base of the robot. Thus, at the maximum diameter portion of the cam, the back of the flipper would be pushed up (pushing the flipper into the ground) and the hammer would be at its highest with the most spring force acting downward. When the cam rotated past its threshold, the elastic force + weight of the hammer would activate the flipper, then immediately hit the dislocated opponent robot. While this was not the intent, in potential combat situations, the tubing could be wrapped tighter, increasing the potential energy in the system and dealing a heavier blow, though also increasing the damage to itself each time the attack triggered. One of the initial goals of the team, in order to incorporate students who preferred to code robots, was to make autonomous robots. In practice, Manny became the testing robot for the firmware subteam because of its relative fragility compared to most competition robots in its weight class and its active weapon that gave the robot far more strategic capabilities. Over the next several months, the team worked to develop a vision tracking system that worked using just an ultrasonic sensor mounted on a servo and the motion of the robot to identify opponent robots and activate its attack once they were close enough. A future goal of the project is to have Manny fight one of our tele-operated robots at a showcase and see who wins.